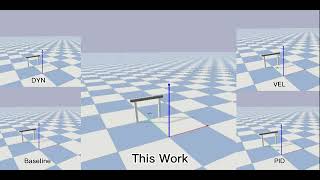
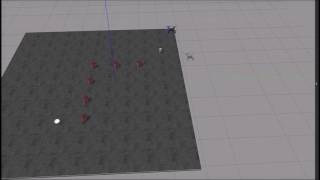
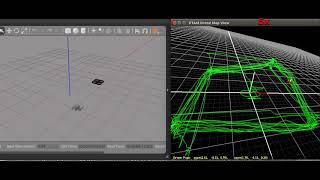
Media Summary: Control of a Quadrotor with Reinforcement Learning in Gazebo simulation A swarm of autonomous Unmanned Aerial Vehicles ( Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment
Reinforcement Learning Gazebo Uav Simulation Environment - Detailed Analysis & Overview
Control of a Quadrotor with Reinforcement Learning in Gazebo simulation A swarm of autonomous Unmanned Aerial Vehicles ( Fly through A Gate: Reinforcement Learning in Gym-PyBullet-Drones Environment Indoor Autonomous Navigation of Ardrone, based on Q-Learning( Dive into the future of robotics! This video demonstrates how run a This video demonstrates the training process of the Cartpole robot with RL algorithm(Q-