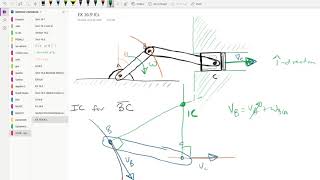
Media Summary: Lecture on 16.4 and working of example 16.3.
Ex 16 16 Engineering Dynamics Matt Pusko - Detailed Analysis & Overview
Lecture on 16.4 and working of example 16.3.
Media Summary: Lecture on 16.4 and working of example 16.3.
Lecture on 16.4 and working of example 16.3.

Working of example 16.16.

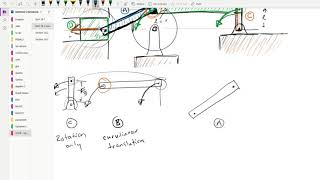
lecture on types of motion.

working of example 16.15.

working of example 16.8.
Working and explanation of

Lecture on 16.4 and working of example 16.3.

Working of F17.

Working of

working of example 16.17.
Explanation of figure

working of example 16.2.

working of example 16.4.

working of example 16.1.

working of example 16.10.

working of example 16.12.

This is example 15.3 from Hibbeler's
